数学美 之 判断线段相交的最简方法
解析几何的巅峰 是 向量 那无关过程的狂妄与简洁 映射着大自然无与伦比的美
引子
如何判断两条直线是否相交?
这很容易。平面直线,无非就是两种关系:相交 或 平行。因此,只需判断它们是否平行即可。而直线平行,等价于它们的斜率相等,只需分别计算出它们的斜率,即可做出判断。
但倘若我把“直线”换成“线段”呢——如何判断两条线段是否相交?
这就有些难度了。和 直线 不同,线段 是有固定长度的,即使它们所属的两条直线相交,这两条线段也不一定相交。
也许你会说:分情况讨论不就行了嘛:
- 先计算两条线段的斜率,判断是否平行。若平行,则一定不相交。
- 若不平行,求出两条线段的直线方程,联立之,解出交点坐标。
- 运用定比分点公式,判断交点是否在两条线段上。
的确,从理论上这是一个可行的办法,这也是人们手动计算时普遍采用的方法。
然而,这个方法并不怎么适用于计算机。原因如下:
- 计算中出现了除法(斜率计算、定比分点),因此每次计算前都要判断除数是否为 0(或接近 0)。这很麻烦,严重干扰逻辑的表达。
- 浮点精度丢失带来的误差。人类计算时可以采用分数,但计算机不行。计算机在储存浮点数时会有精度丢失的现象。一旦算法的计算量大起来,误差会被急剧放大,影响结果准确性。
- 效率低下。浮点乘除会十分耗时,不适用于对实时性要求较高的生产环境(如 游戏)。
那么,有更好的方法?
当然有。
类型预定义
本文的算法将用 python 描述,主要用到两个数据类型:
# 点
class Point(object):
def __init__(self, x, y):
self.x, self.y = x, y
# 向量
class Vector(object):
def __init__(self, start_point, end_point):
self.start, self.end = start_point, end_point
self.x = end_point.x - start_point.x
self.y = end_point.y - start_point.y
先在此处说明。
问题分析
对于“判断两条直线是否相交”这个问题,我们之所以能迅速而准确地进行判断,是因为“相交”与“不相交”这两个状态有着明显的不同点,即 斜率是否相等。
那么现在,为了判断两条线段是否相交,我们也要找出“相交”与“不相交”这两个状态的不同点。
假设现在有两条线段 AB 和 CD,我们画出它们之间的三种关系:
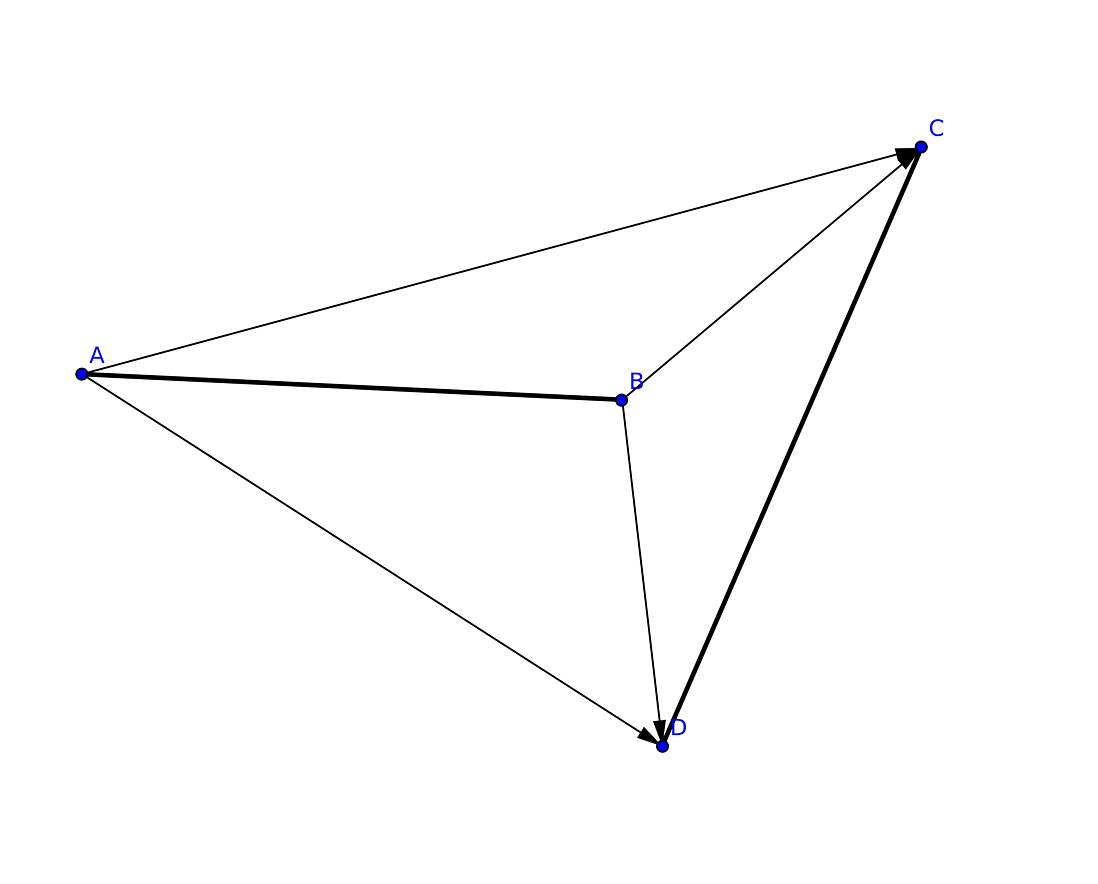


其中,情况 1 为不相交,情况 2、3 为相交。
作出向量 AC、AD、BC、BD。
首先介绍一个概念: 向量有序对的旋转方向。这个概念指:对于共起点有序向量二元组(a, b),其旋转方向为 使 a 能够旋转一个小于 180 度的角并与 b 重合的方向,简记为 direct(a, b)。若 a 和 b 反向共线,则旋转方向取任意值。
举个例子:图一中,direct(AC, AD) 为顺时针方向。
接下来我们要分析四个值:direct(AC, AD)、direct(BC, BD)、direct(CA, CB)、direct(DA, DB)。
- 对于图一,
direct(AC, AD)和direct(BC, BD)都为顺时针,direct(CA, CB)为逆时针,direct(DA, DB)为顺时针。 - 对于图二,
direct(AC, AD)为顺时针,direct(BC, BD)为任意方向,direct(CA, CB)为逆时针,direct(DA, DB)为顺时针。 - 对于图三,
direct(AC, AD)、direct(DA, DB)为顺时针,direct(BC, BD)、direct(CA, CB)为逆时针。
不难发现,两条线段相交的充要条件是:direct(AC, AD) != direct(BC, BD) 且 direct(CA, CB) != direct(DA, DB)。这便是“相交”与“不相交”这两个状态的不同点。
然而你可能会觉得:旋转方向这么一个虚无飘渺的东西,怎么用程序去描述啊?
再来看一幅图:
再来定义有向角:
有向角
<a, b>为 向量a逆时针 旋转到与 向量b重合所经过的角度。
不难看出,对于向量a、b:
- 若
direct(a, b)为逆时针,则0 <= <a, b> <= 180,从而sin<a, b> >= 0。 - 若
direct(a, b)为顺时针,则180 <= <a, b> <= 360,从而sin<a, b> <= 0。
这样一来,我们可以将旋转方向的问题转化为 求有向角正弦值 的问题。而这个问题,是很容易的。
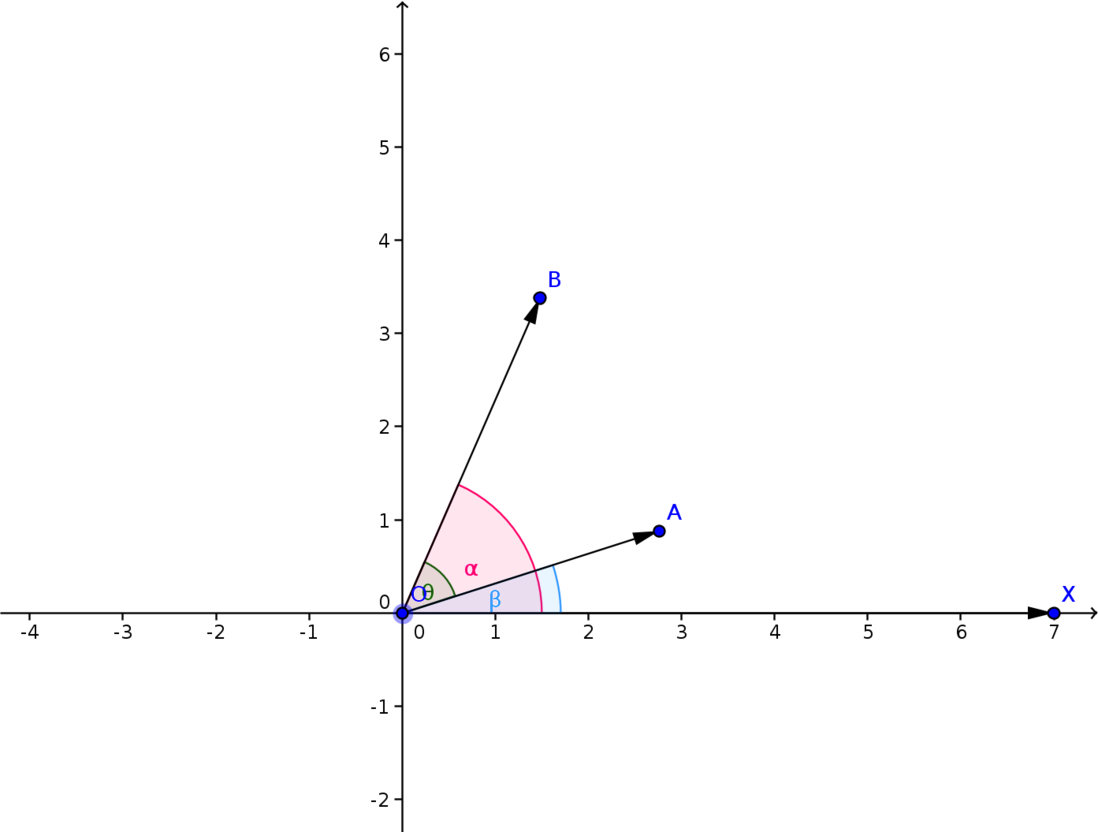
如上图,记
$$ OA = (x_1, y_1), OB = (x_2, y_2) $$ $$ |OA| = r_1, |OB| = r_2 $$
则
$$ sin(\lt OA, OB\gt) $$ $$ = sin \theta $$ $$ = sin (\beta - \alpha) $$ $$ = sin \beta cos \alpha - sin \alpha cos \beta $$ $$ = \frac{(sin \beta cos \alpha - sin \alpha cos \beta) r_1 r_2}{r_1 r_2} $$ $$ = {(x_1 y_2 - x_2 y_1) \over (r_1 r_2)} $$
而这里,我们要的只是 sin(<OA, OB>) 的符号,而 r1 和 r2 又都是恒正的,因此只需判断 x1 * y2 - x2 * y1 的符号即可。
这个方法的数学背景是 叉乘,可以前往 Wikipedia 了解更多。
思路小结
- 由点 A,B,C,D 计算出向量 AC,AD,BC,BD
- 计算
sin(<AC, AD>) * sin(<BC, BD>)和sin(<CA, CB>) * sin(<DA, DB>),若皆为非正数,则相交;否则,不相交。
实现
终于到代码部分了,想必大家都已不耐烦了吧。
在向量的辅助下,代码显得异常简单。
ZERO = 1e-9
def negative(vector):
"""取反"""
return Vector(vector.end_point, vector.start_point)
def vector_product(vectorA, vectorB):
'''计算 x_1 * y_2 - x_2 * y_1'''
return vectorA.x * vectorB.y - vectorB.x * vectorA.y
def is_intersected(A, B, C, D):
'''A, B, C, D 为 Point 类型'''
AC = Vector(A, C)
AD = Vector(A, D)
BC = Vector(B, C)
BD = Vector(B, D)
CA = negative(AC)
CB = negative(BC)
DA = negative(AD)
DB = negative(BD)
return (vector_product(AC, AD) * vector_product(BC, BD) <= ZERO) \
and (vector_product(CA, CB) * vector_product(DA, DB) <= ZERO)
一气呵成,没有恼人的除法,没有情况讨论,只是纯粹的简单运算。
作者:hsfzxjy
链接:
许可:CC BY-NC-ND 4.0.
著作权归作者所有。本文不允许被用作商业用途,非商业转载请注明出处。
